
18988785989
 返回
返回 首页
首页 导航
导航三菱QD77MS4在机器人机械手中的应用
2014-04-19
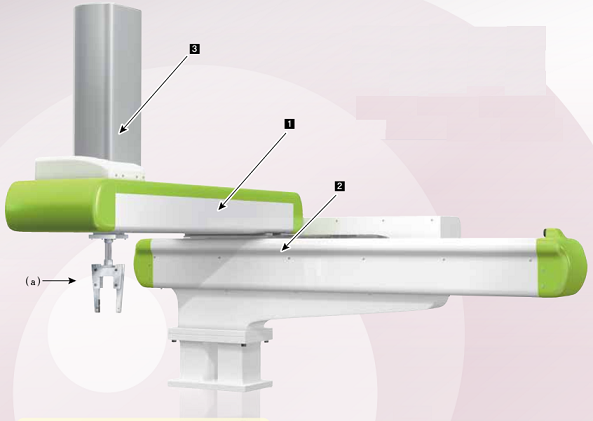
1 X轴 2 Y轴 3 Z轴 (a) 抓手
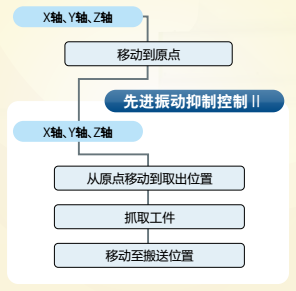
动作流程
现场课题
课题01设备的振动抑制----解决课题:先进振动抑制控制Ⅱ。
课题02简单的振动抑制---解决课题:机器分析仪机械共振抑制滤波器。
课题03使装置紧密----解决课题:3轴一体伺服放大器。
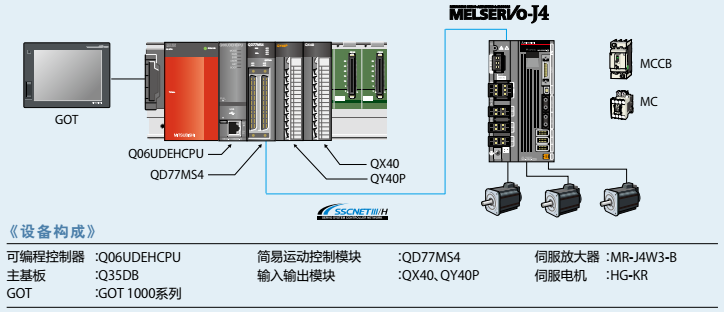
系统模型
解决现场课题
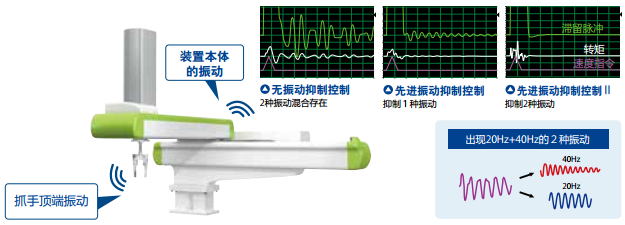
解决01先进振动抑制控制Ⅱ:有效抑制3惯性系机械振动!
通过支持3惯性系的机械的振动抑制算法,可同时抑制2种低频率振动。抓取机械手的末端到抓手顶端有多个振动时,可发挥效果。
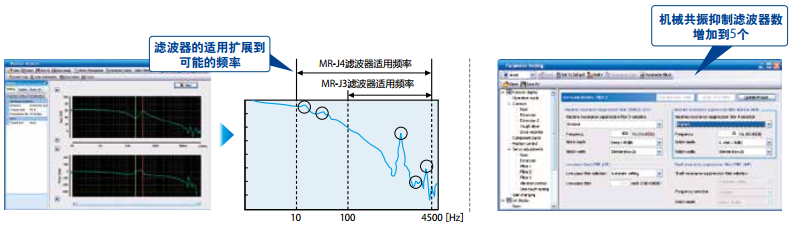
解决02机械分析仪机械共振抑制滤波器:通过机器分析仪与机械共振抑制滤波器也可轻松抑制多个机械振动。
使用机器分析仪解析机械系统的频率特性。使用下列5个机械抑制共振滤波器可抑制振动。
解决033轴一体伺服放大器:节省配线、节省空间,有利于降低设备成本!
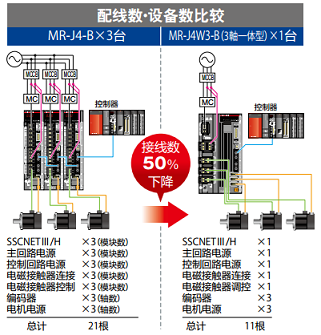
节省配线
◎SSCNETⅢ/H对应的伺服放大器与脉冲列相比,可实现大幅的节省配线。
◎3轴一体伺服放大器是将主回路/控制回路电源、周边设备、控制信号线等的连接3轴通用化,从而大幅削减配线根数及设备数。
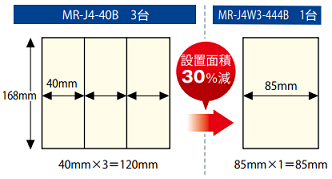
节省空间
与3轴一体伺服放大器中使用3台时相比,可削减30%安装面积。
启动步骤
步骤1:系统构成的设定
进行伺服放大器的设定。

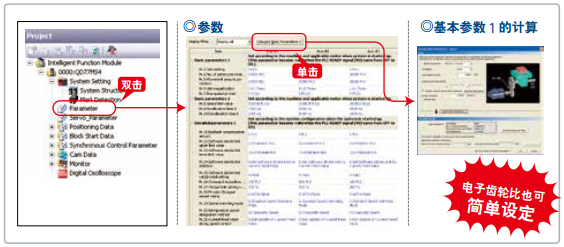
步骤2:参数的设定
使用基本参数1的计算画面,输入电子齿轮比的设定和机械规格,即可计算出所需参数。
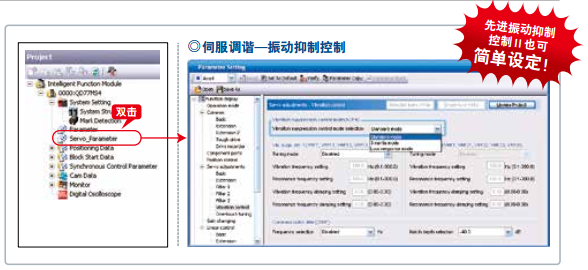
步骤3:振动抑制控制参数的设定
振动抑制模式选择中选择3惯性模式,则先进振动抑制控制Ⅱ有效。
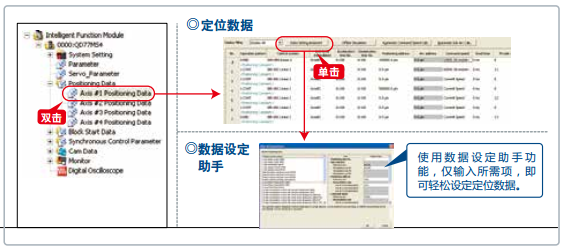
步骤4:定位数据的设定
设定各轴的定位数据。
该《应用案例》适用于X-Y平台、密封、搬运设备、机器人、机械手等。
 其它问题
其它问题




